Kenji-X1, Modular Tele-Robotics Platform
A project in Berlin, Germany by Physalis Labs000days
:
00hours
:
00minutes
Funding Unsuccessful

Kenji-X1 is an Open-Source and Modular Tele-Robotics Development Platform for Monitoring and Terrain-Exploration Applications on Land
Backers: 13
Average Pledge Per Backer: €575
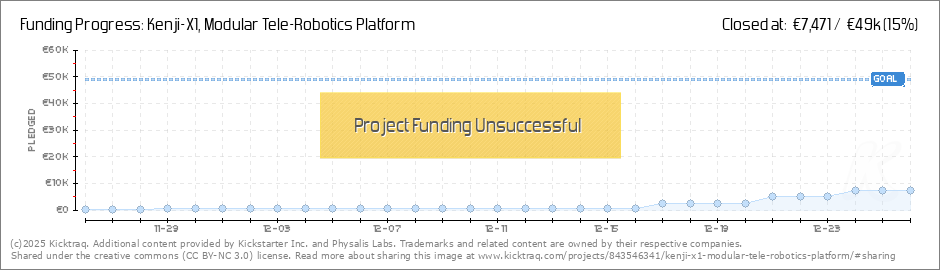
Funded: €7,471 of €49,000
Dates: Nov 26th -> Dec 26th (30 days)
Project By: Physalis Labs
Backers: 13
Average Pledge Per Backer: €575
Funded: €7,471 of €49,000
Dates: Nov 26th -> Dec 26th (30 days)
Project By: Physalis Labs

€7,471
current pledge level
Last Updated: December 26 @ 08:08 -0500 GMT
15%
of goal
(loading your very own snazzy kicktraq chart)
Latest News
Kenji-X1 open source modular robot platform
November 29th - via: geeky-gadgets.com
If you are interested in robotics and building your very own robot you may be interested in the Kenji-X1 open source modular robotics platform. Specifically created to provide an easy-to-use platform for monitoring and terrain exploration applications on land, the modular robotic system can easily be modified to suit your requirements and features a camera, obstacle avoidance technology, mapping, mechanical arms, sensors, wireless connectivity with a chassis and components made from industrial grade materials. (Read More)
If you have additional news that doesn't appear here, shoot us a link!